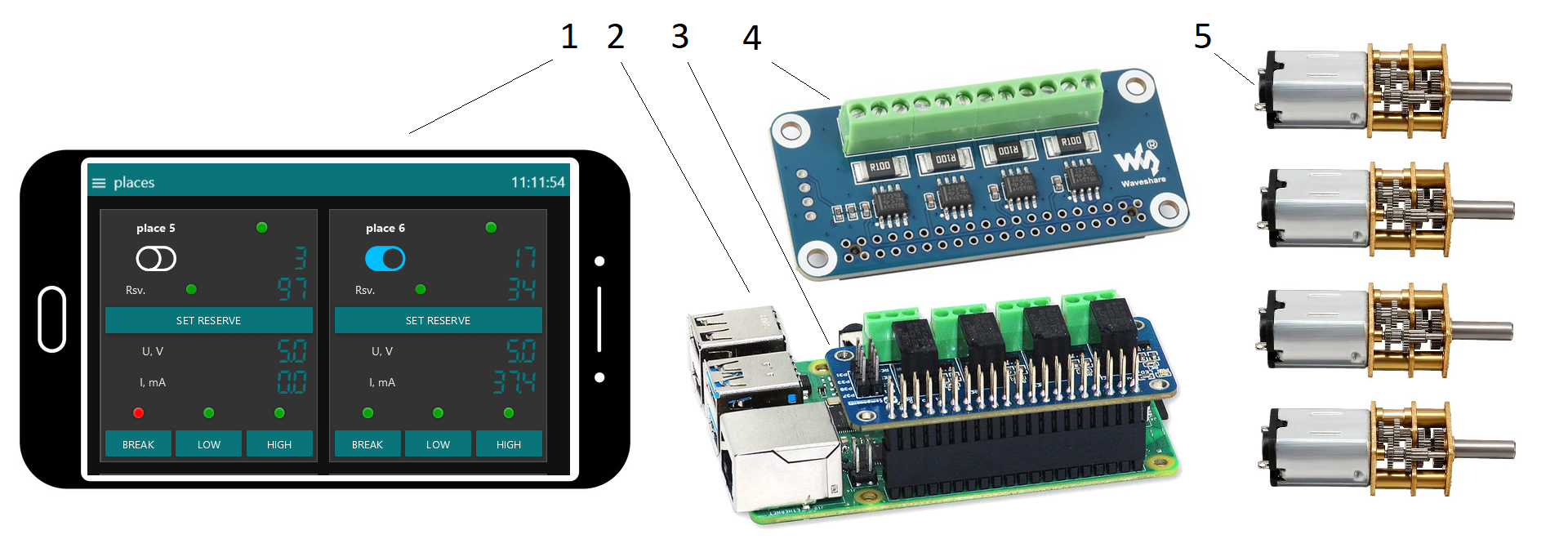
4-канальное управление электродвигателями (для автоматических кормушек, насосов, вентиляторов) на основе Raspberry PI, проектирование в Node-Red.
1 — Смартфон /планшет
2 — Raspberry PI с установленной Node-Red
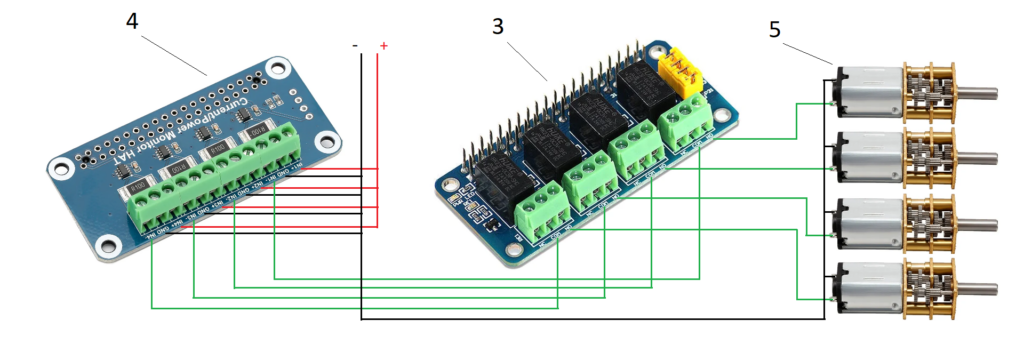
3 — Реле 4-Channel Relay Board for Pi Zero
4 — INA219 (i2c, 4 канала) Waveshare Current/Power Monitor Hat
5 — Мотор (5 — 24 В)
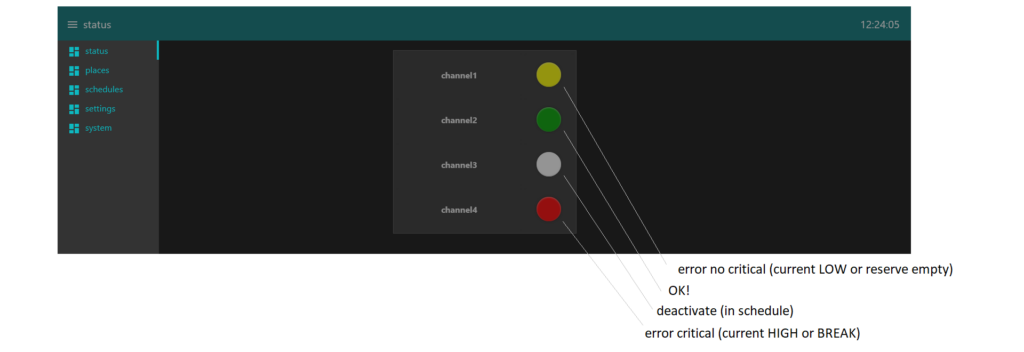
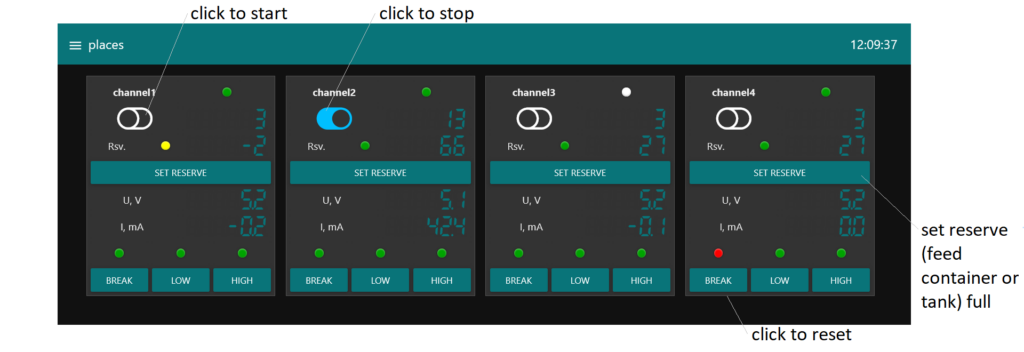
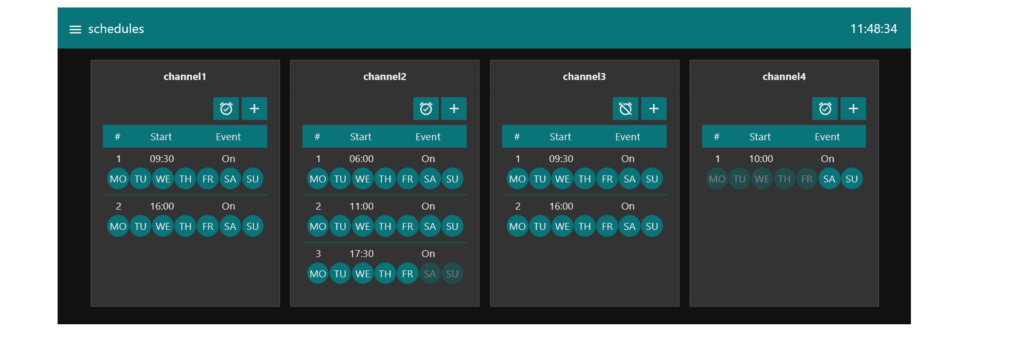
Двигатели включаются и выключаются по заданному расписанию. Контроль работы двигателя осуществляется на основе измерений тока в цепи с помощью 4-канального INA219 (по шине i2c). Оповещения об ошибках (обрыв, перегрузка, холостой ход ) по Email, Telegram.
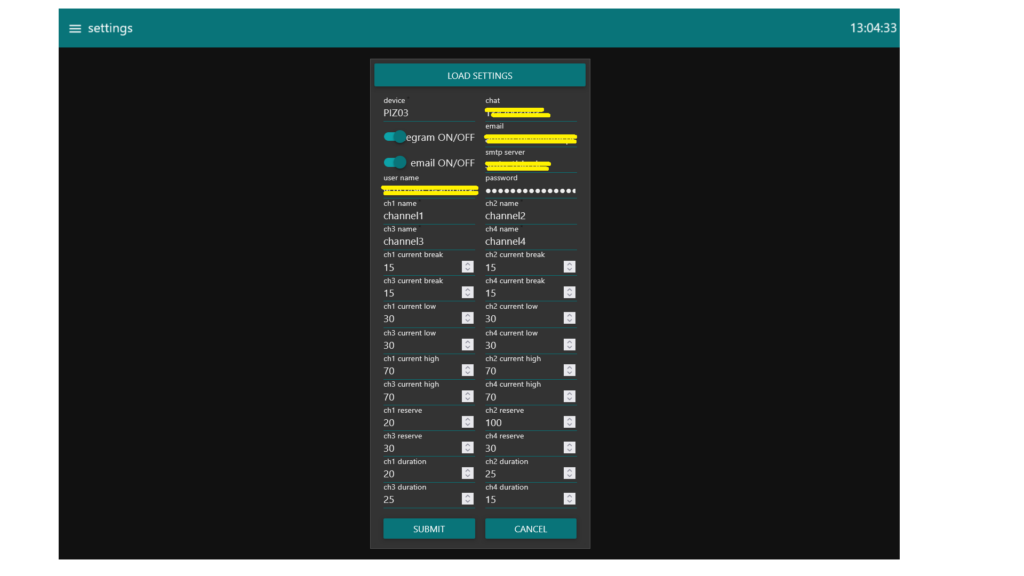
Конфигурация (расписание, значения токов обрыва, перегрузки, холостого хода, адрес эл. почты, телеграм-токен и т.д.) через браузер (Node-Red UI).
Смартфон /планшет может быть также использован в качестве маршрутизатора.
Значения токов обрыва, перегрузки, холостого хода для двигателей /насосов определяются экспериментально.
Скриншоты: