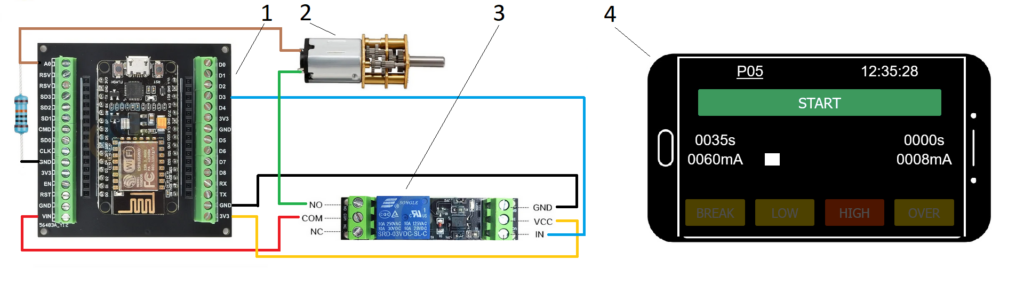
Управление электродвигателем (для автоматических кормушек, насосов, вентиляторов) на основе ESP8266, проектирование в Arduino.
1 – ESP8266 с Breakout Board и резистор (3 Ом)
2 – Мотор (5 – 24 в)
3 – Реле
4 – Смартфон /планшет
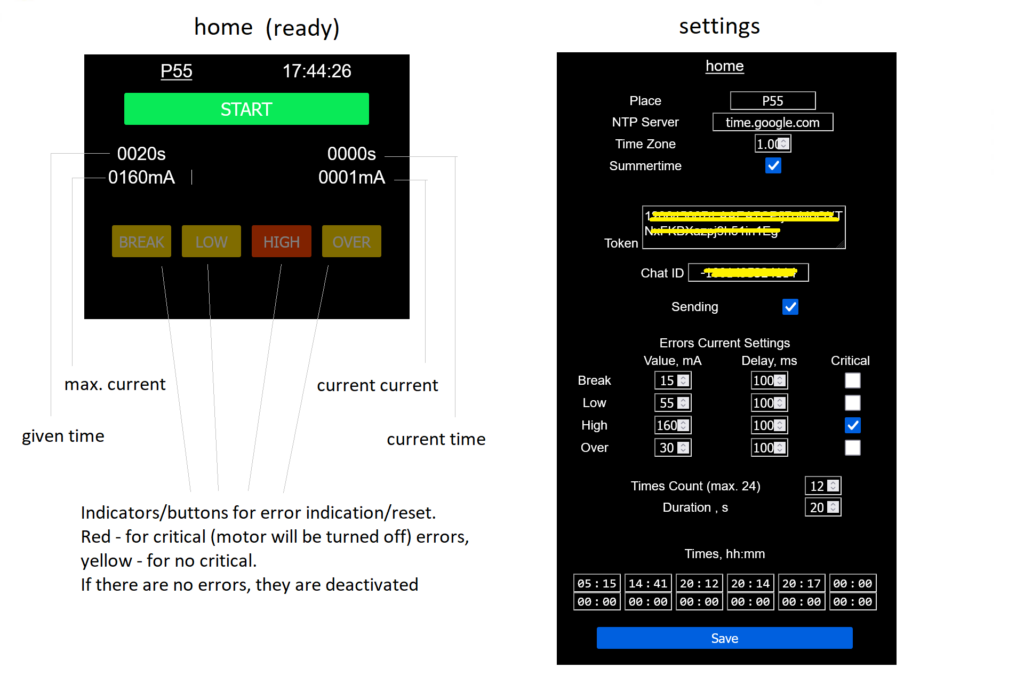
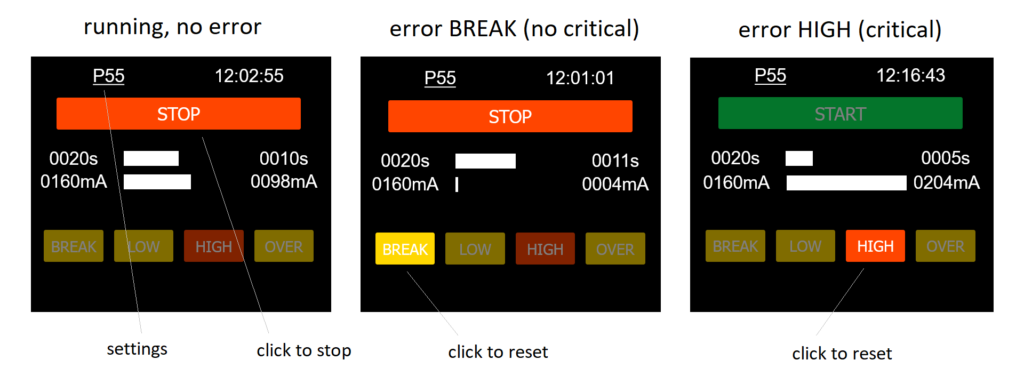
Двигатель включается и выключается по заданному расписанию. Контроль работы двигателя осуществляется на основе измерений тока в цепи. Оповещения об ошибках (обрыв, перегрузка, холостой ход ) по Telegram.
Конфигурация (расписание, значения токов обрыва, перегрузки, холостого хода, телеграм-токен и т.д.) через браузер.
Смартфон /планшет может быть также использован в качестве маршрутизатора.
Значения токов обрыва, перегрузки, холостого хода для двигателей /насосов определяются экспериментально.
Скриншоты: